Elettronica 2.0
obiettivi
i principali obiettivi che mi ero dato per rivedere la cartografia e i sistemi di controllo erano nati dal fatto che la strumentazione esistente non era completamente integrata o non lo era per niente, che la cartografia a parte il plotter esterno era installata su un vecchio PC windows che necessitava di una tensione 220v e quindi utilizzabile solo in banchina o con l’inverter.
Dato che non frequento marina era indispensabile gestire il tutto con strumenti a 12v.
I punti fermi che mi ero posto:
- tutta la strumentazione a 12V e quindi eliminare il PC a 220v e eventuale inverter
- utilizzo della connettività internet e della posta
- ridondanza delle informazioni
- interfaccia fra i vari strumenti
- monitoraggio ambientale e dati di bordo e sistemi di allarmistica
- utilizzo sistemi open source
- replica dati su server in cloud e mantenere la storia dei dati e delle rotte
- non ultimo contenimento dei costi e apertura a upgrade successivi
primo step
il vantaggio di aver sempre lavorato in aziende di informatica e a contatto con collaboratori che ne sanno di programmazione e sistemi aperti mi ha aiutato a fare alcune scelte.
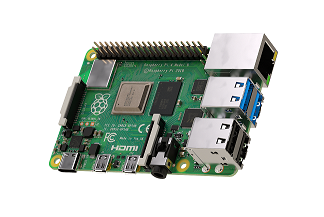
Sono partito dall’acquisto di un Raspberry Pi 2 computer in ambiente Linux con le seguenti caratteristiche: 1 Gb di RAM,4 porte USB 2.0, 1 connettore RCA per video compositivo, HDMI, jack audio, connettore microSD, porta ethernet 10/100 RJ-45, GPIO 40 pin
A questo ho collegato un monitor 15” , mouse e tastiera bluetooth , 1 alimentatore 12V con interfaccia Micro USB, 1 cavo HDMI per il monitor

In laboratorio ho installato il raspberry collegato al monitor e a tastiera e mouse via bluetooth inserita la card con il sistema operativo NOOBS. A questo punto il sistema è pronto per partire con il sistema base OPENPLOTTER.
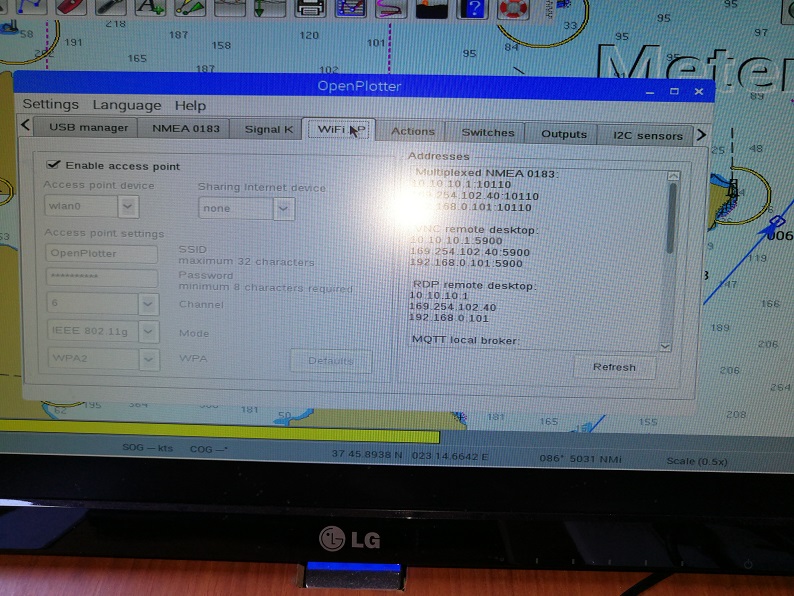
Openplotter è un sw sviluppato da un gruppo di ragazzi catalani che lo rilasciano gratuitamente e periodicamente rilasciano degli aggiornamenti. Quando ho installato il sistema eravamo alla versione 8.4.0 ora è disponibile la v1.0.0 che ha migliorato la grafica e le statistiche dei dati.
Il sistema ha una serie di funzionalità :
- un sistema di navigazione cartografico interfacciato con varie cartografie
- un sistema di ricezione AIS tramite un dongles via USB
colloquio con protocollo NMEA2000 e NMEA0183 tramite un adattatore USB
- visualizzazione files GRIB
- simulazione bussola
- interfaccia con pilota automatico
- access point WiFi
- connessione con sensori di temperatura umidità e pressione
- connessione con sentori di temperatura
- input e output digitali con switch, relays, led e buzzer
- possibilità di monitoraggio remoto
- pannello di controllo dati
Ho poi installato fra le carte compatibili con Openplotter la cartografia OPENCPN
la scelta oltre al fatto che sono gratuite hanno alcune funzioni che per me erano indispensabili quali;
- i target AIS visibili sulla chart con allarme collisione
- anchor alarm
- MOB alarm con traking
- sovrapposizione sulla carta dei files GRIB
- traking GPS
direi che per una cartografia gratuita non è poco oltre ovviamente registrare dei waypoint delle rotte e tutte le normali funzioni di un plotter


questa configurazione mi è costata 35€ raspberry, 10€ GPS, 12€ barometro altri pochi euro per alimentatore 15€ monitor e mouse mentre per il monitor ho recuperato un vecchio 15” usato.
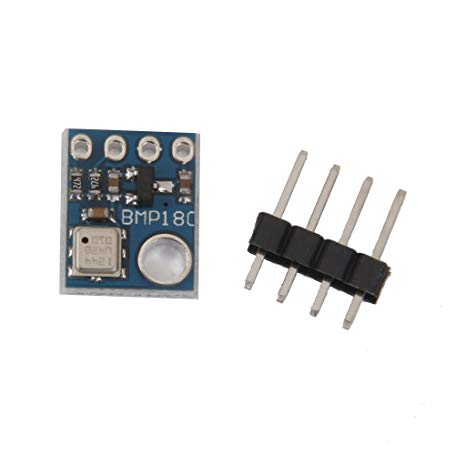
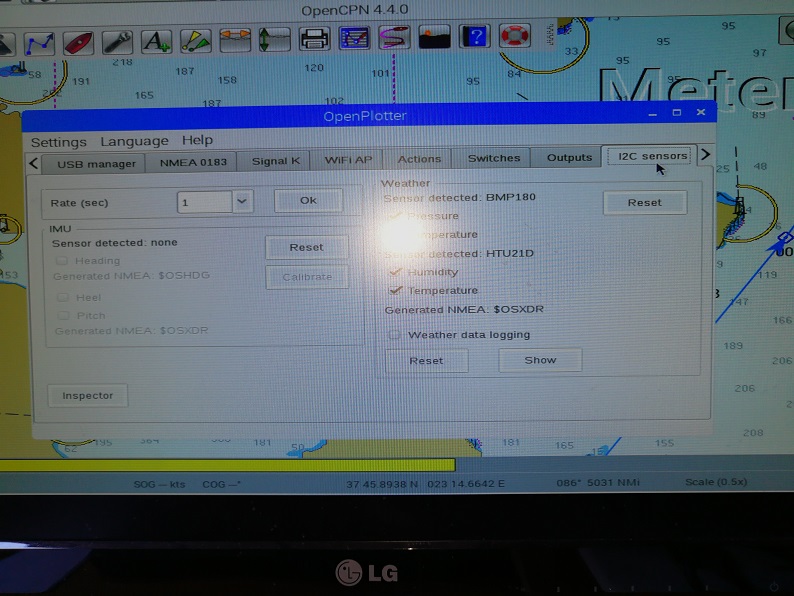
Per configurarlo occorre semplicemente aprire la cartella I2C e selezionare i sensori che avete collegato.
Il tutto funziona con un semplice alimentatore a 12 V che alimenta il raspberry e il monitor.
Una delle funzioni presenti in Openplotter è quella dell’AIS gestibile per messo di un semplice Dongle AIS da collegare sempre su una porta USB. Avendo già un apparato AIS classe B installato a bordo è stato sufficiente collegare il cavetto in dotazione dall’AIS ad una porta USB del Raspberry.

Ho eliminato il vecchio PC e ora sul tavolo da carteggio non c’è neanche un cavo, quando mi serve sfilo da sotto tastiera e mouse e accendo da pannello generale il sistema.
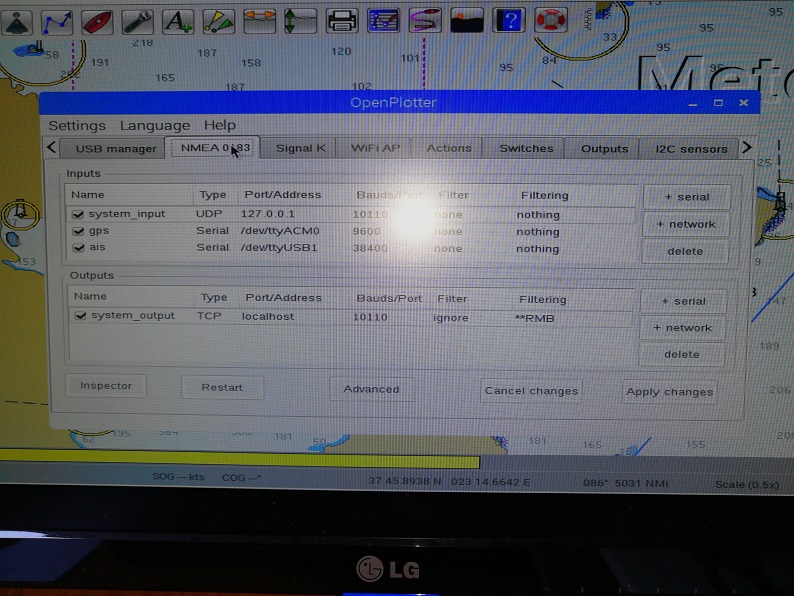
Collegato il GPS ad una porta USB e l’AIS con il suo convertirore NMEA si va sulla cartella NMEA183 e si battezzano le relative porte come porta GPS e AIS (attenzione che normalmente il GPS ha una frequenza di 9600 mentre l’AIS di 38400 per cui nella colonna baud va inserita la velocità di trasmissione)
Un router con SIM dati configurato in wifi mi permette il collegamento a Internet e alla mia posta elettronica.
Ho poi installato ZYGRIB per scaricarmi i files grib e installato su Opencpn il plugin zygrib scaricabile dal sito opencpn.org.

secondo step
Mi sono poi divertito a stendere per la barca un po’ di sensori uno nel frigorifero, uno nella presa a mare dell’acqua salata e uno nel gavone del motore e li ho collegati nei connettori GPIO del Rasperry come da specifiche. In questo modo a monitor ho il controllo della temperatura del frigo, dell’acqua e del gavone motore.

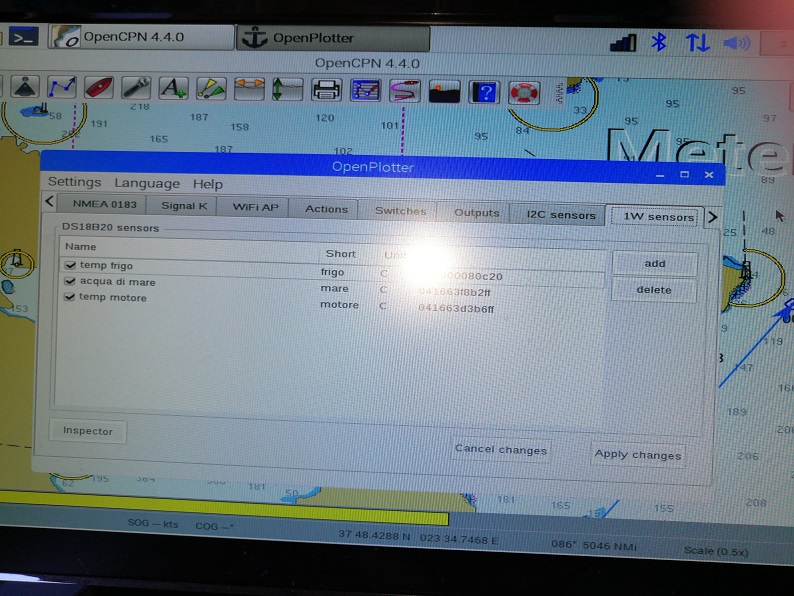
Nella cartella di Openplotter 1W sensors è sufficiente aggiungere gli eventuali sensori che avere collegato al raspberry e dal pannello inspector si possono visualizzare le temperature di ognuno di questi.
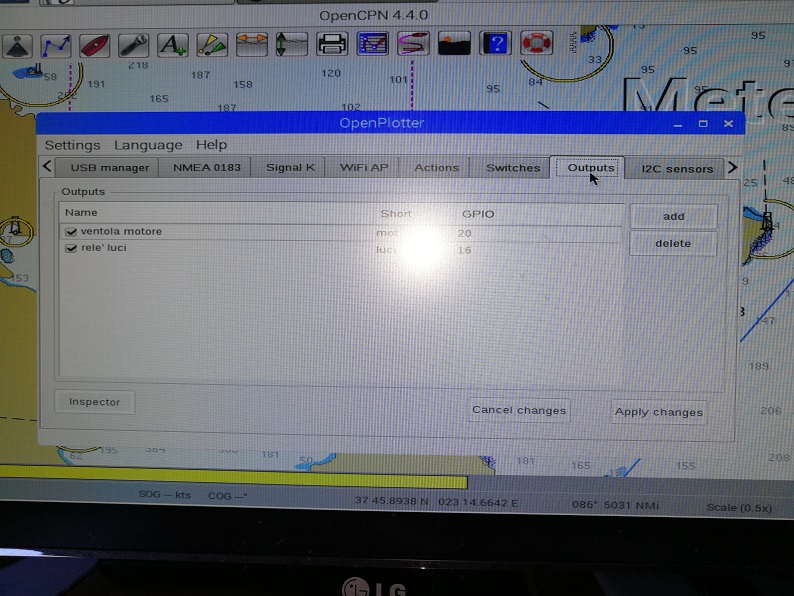
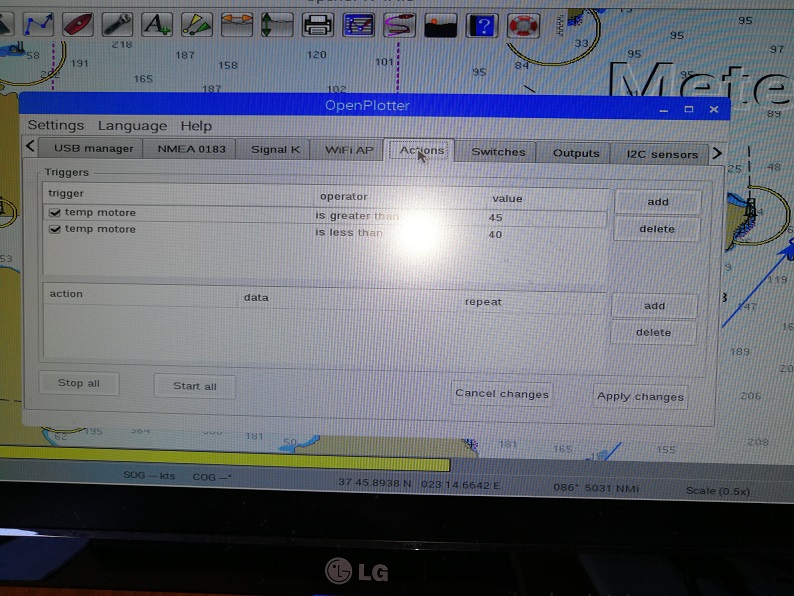
Non contento ho aggiunto ad un altro GPIO un relay e configurato su openplotter il controllo del sensore del gavone motore; in questo modo in automatico attivo e disattivo la ventola di raffreddamento del motore.

Per collegare il tutto ho dovuto smontare mezza barca ma la soddisfazione quando ho visto funzionare il sistema è stata grande. La ventola che attiva il ricircolo dell’aria viene azionata manualmente da un pulsante nel quadro motore e puntualmente mi dimentico sempre di azionarla e quando mi ricordo mi dimentico poi di spegnerla. In questa maniera è tutto automatico.
Dato che avevo la barca mezzo smontata ho anche portato un cavetto nel pozzetto vicino al quadro motore e collegato un piccolo buzzer che mi avverte quando l’AIS segnala una rotta di collisione con un target nel raggio di 12 mn e un altro segnale quando attivo l’allarme per l’ancora quando sono in rada.


E stato necessario installare un piccolo hub a 4 porte in quanto quelle disponibili sul raspberry le ho utilizzare per la chiavetta bluetooh, per il GPS e per l’AIS. Ne ho trovato uno che si autoalimenta tramite la sua porta USB.

Da una scatola di derivazione dello strumento B&G ho collegato due cavetti in uscita per le indicazioni velocità vento e direzione e tramite un convertitore NMEA0183 l’ho collegato a una porta USB.
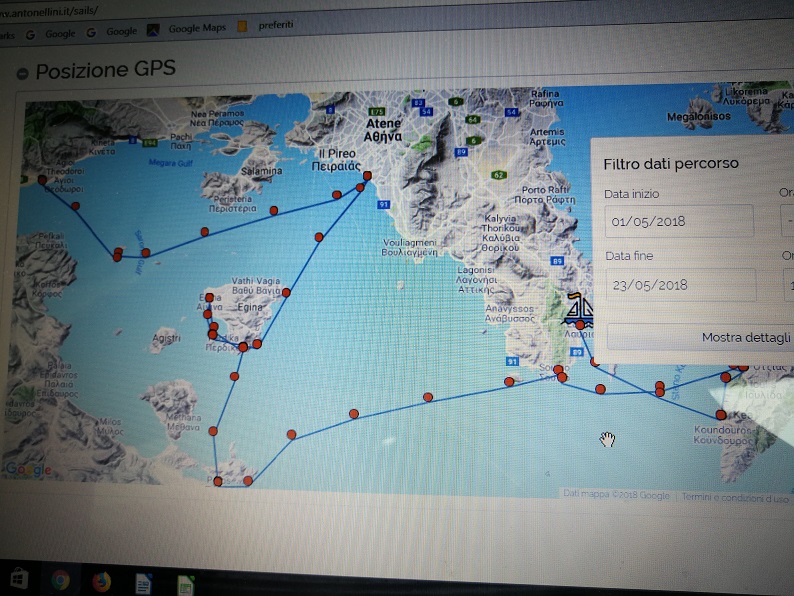
Ho poi fatto un programmetto in python che registra i dati di navigazione ogni mezz’ora su un un DB locale sul raspberry e quando accendo la saponetta (router) trasferisce sul mio server in cloud i dati del viaggio.
Cosi da casa possono sapere sempre dove sono.